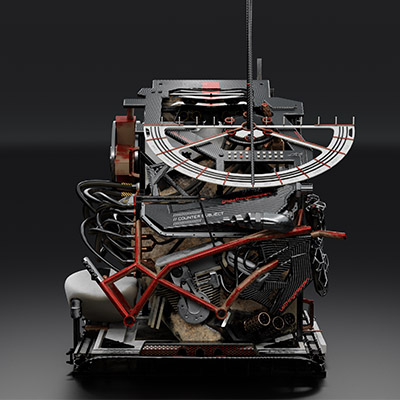
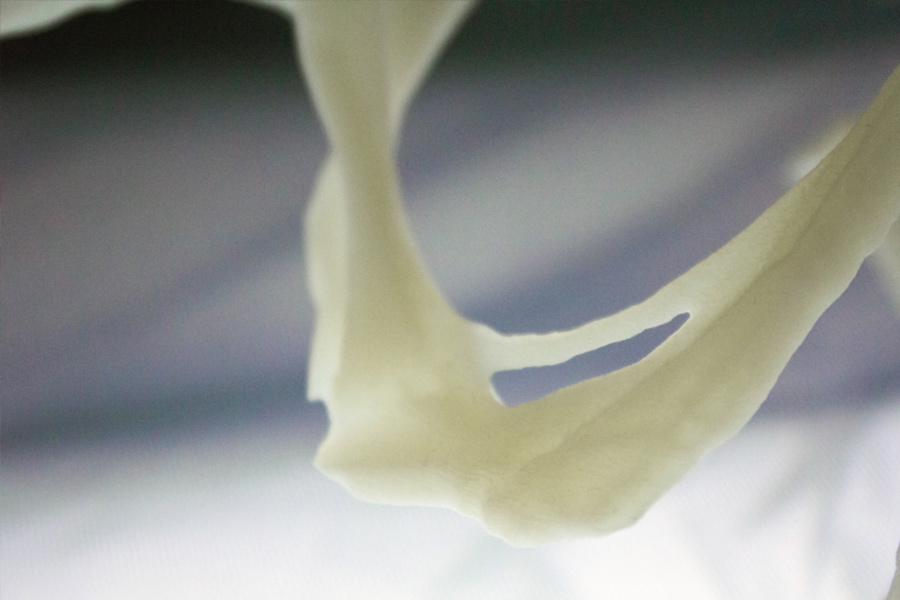
Quadcopter, Motion Capture System, Opengl Simulation, 3d Printed Flightpath, Flat Screen Television
2013






We are at the dawn of a robotics revolution, which has already begun to transform the landscape of manufacturing, reconnaissance, surgery, and modern warfare. But what of the human psyche?
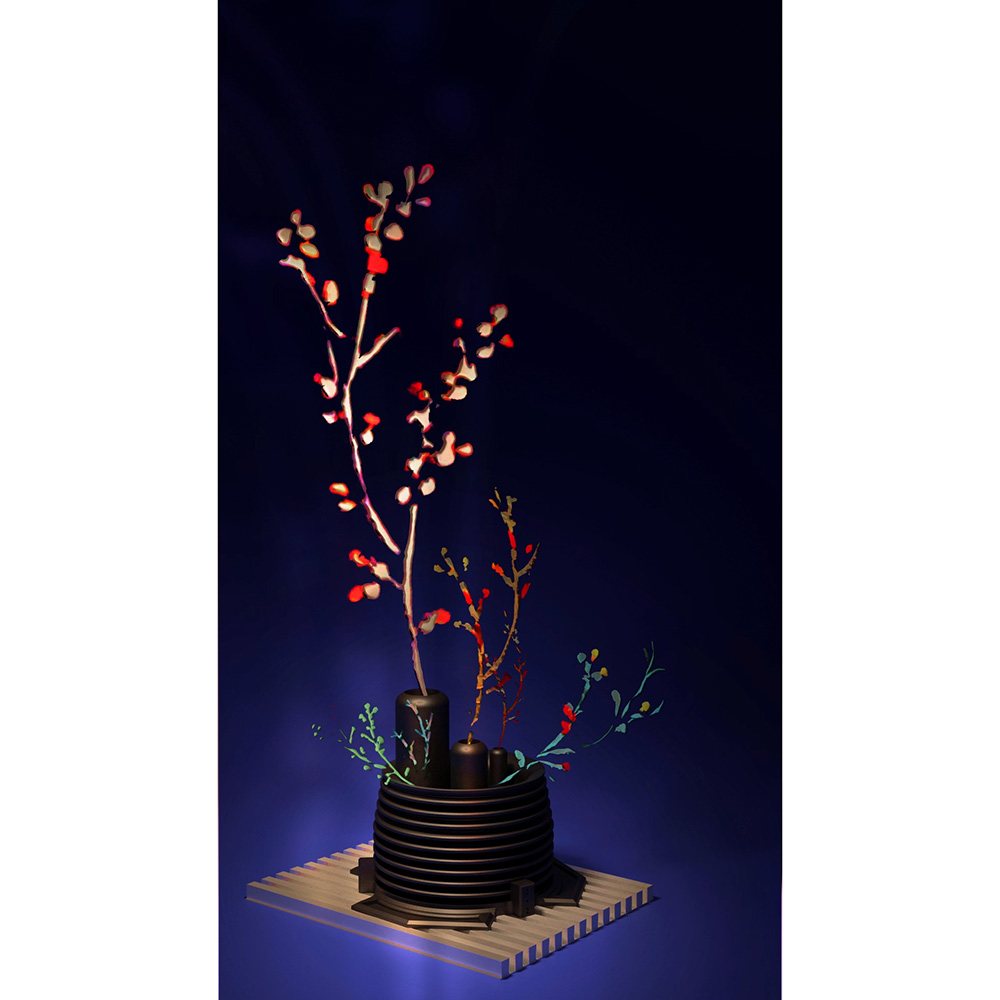
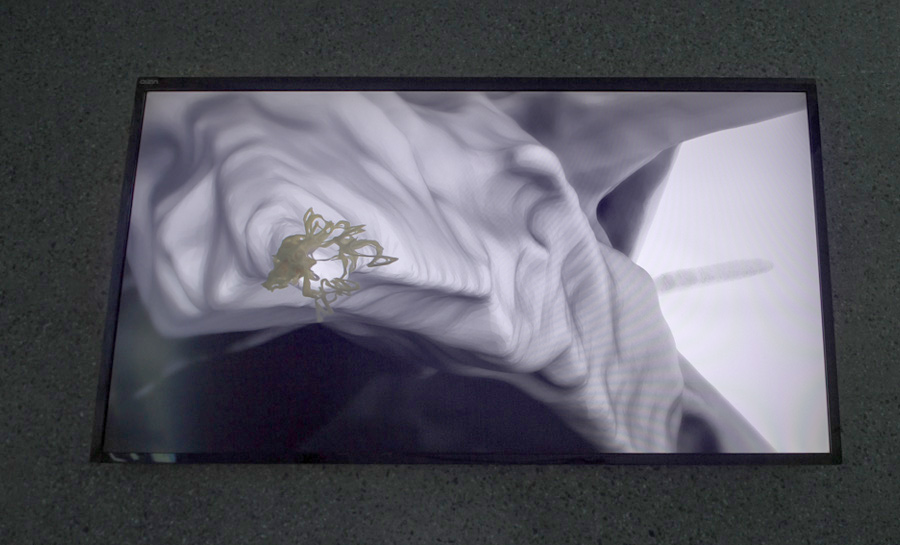
Charon is an interactive installation and sculpture intended to physically embody the tension between humans, robotic autonomous agents, and the virtual models which these agents rely on to understand the world.
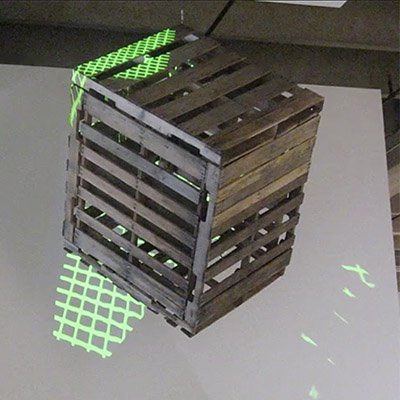
A quadcopter was programed to fly autonomously in a motion capture lab while aggressively, defensively, and playfully tracking a human body within the space. The video documentation of this interaction has a performative, dance-like quality, but is unrehearsed and spontaneous because of the unpredictable nature of the drone's behavior. Interacting with the drone gave me a sense of cautious curiosity as our behavior ebbed and flowed between combat and cooperation.
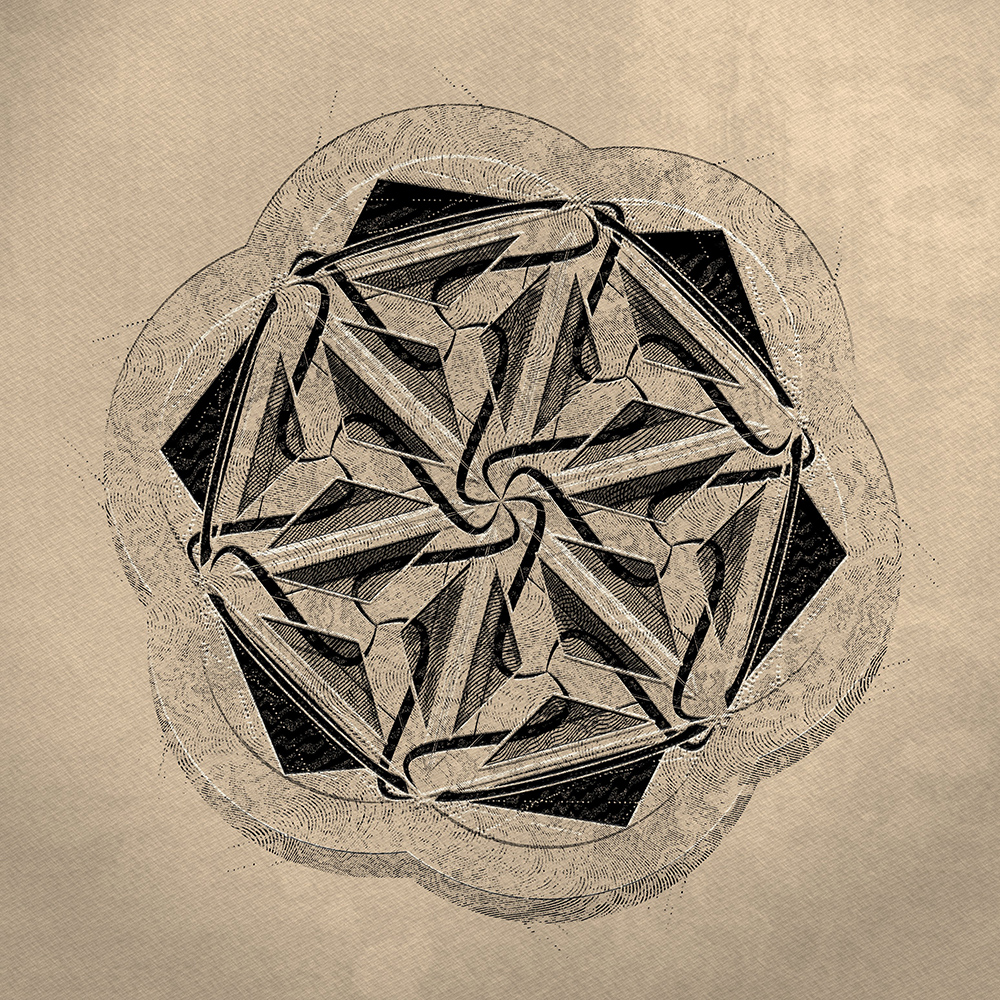
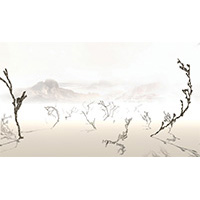
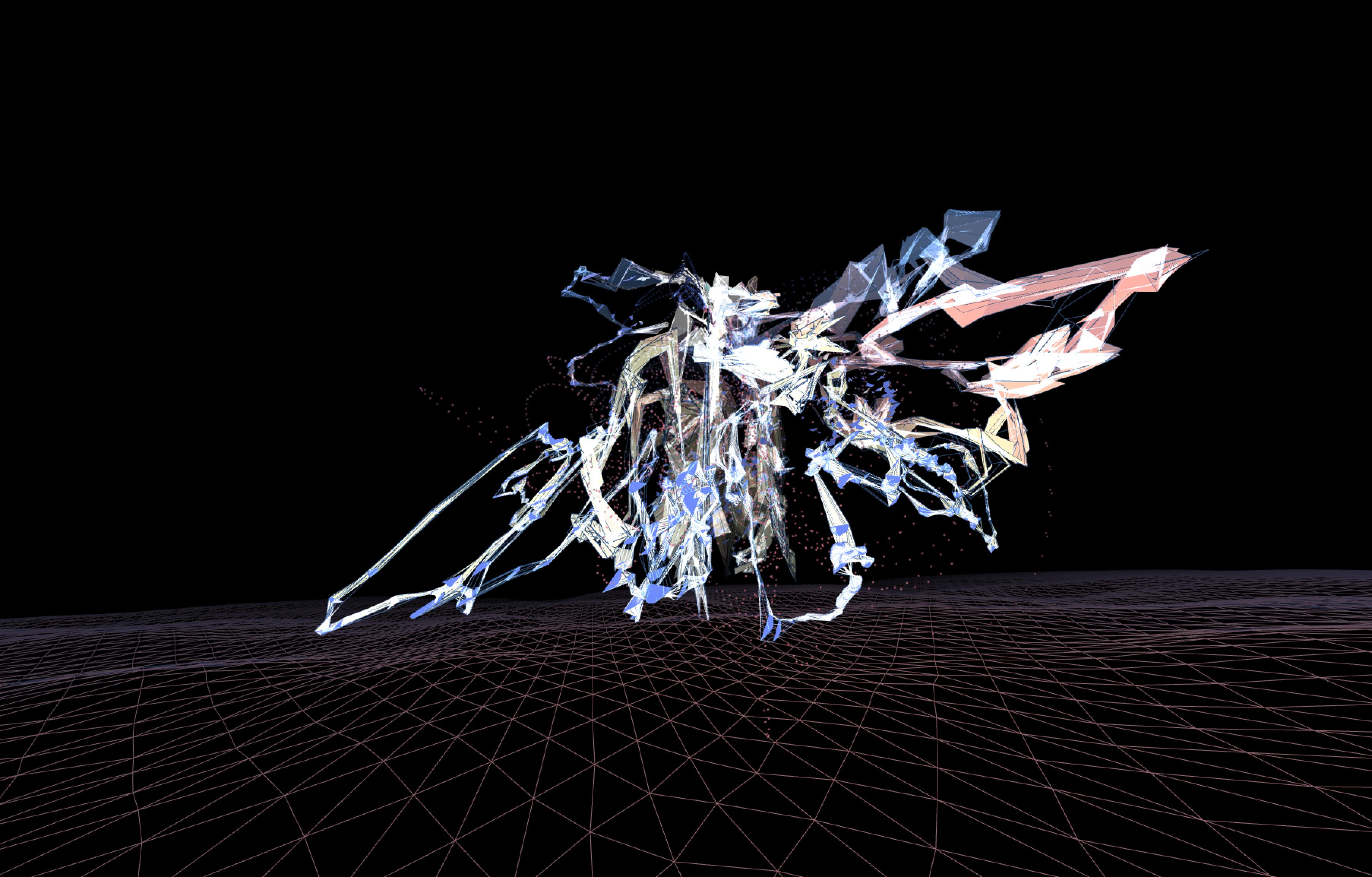
A motion capture system and computer simulation recorded the drone's flight path and rendered it as a 3D form based on the drone's velocity and orientation during flight. As I evaded and lured the drone through the lab its virtual representation collided with the previous flight path which then sculpted the form in the direction of the flight. This feedback loop gave the sculpture a kind of memory and responsiveness which allowed for the complexity of our interaction to be faithfully embodied.
A copy of the path was also being spatially deformed by a basis function, which then acted as a resistant force for the drone to contend with, somewhat like a virtual-wind. A collision with this force agitated the drone changing its emotions and behavior. Just as the physical wind being pushed from the drone's rotors billowed through the physical space and affected its behavior, so too did this virtual force act upon the drone and reach back into the physical space.
These physical and virtual forces created a two-way boundary crossing between the internal world-model of the drone, and its external physical surroundings. The resulting sculpture can be considered as the shadow of this boundary crossing, fueled by the complex exchange between a sentient human and a robotic proto-lifeform.
Charon is the ferryman on the river styx, the mediator between the physical world and the underworld. In Greek mythology Charon was born from Erebus (darkness) and Nyx (night) who were two of the first five primordial beings to come into existence, created by the source of all existence, Chaos. The name of Charon comes from the Greek word charopós, “of keen gaze”. The drone wirelessly receives its vision and thoughts from an array of cameras and computers which act as an extension of its being. The lab when considered as whole a system is akin a living creature's biological functions. This system is the flagellum of a global organism just beginning to awaken.
As a civilization, and as a species, we have crossed the river Rubicon into uncharted territories from which we cannot return. These intelligent agents both embodied and disembodied, visible and invisible, physical and virtual, are surveilling, contemplating and evolving among us. The tension between the human, the Technological-Other and the alloself will define the 21st century. How will these entities reach beyond the limits of symbolization, and how will their emotional, psychological, and spiritual frameworks emerge?
For more information on how this work was made and previous related works, see my MFA thesis on the topic CHARON: The Self and the Technological-Other or a shorter summary at Animal New York "Artist Notebook: Sterling Crispin" and Topology of Desire.
Special thanks to Tim Wood, Marcos Novak and everyone at the transLAB.